The RTX Raytheon Autonomous Vehicle Competition
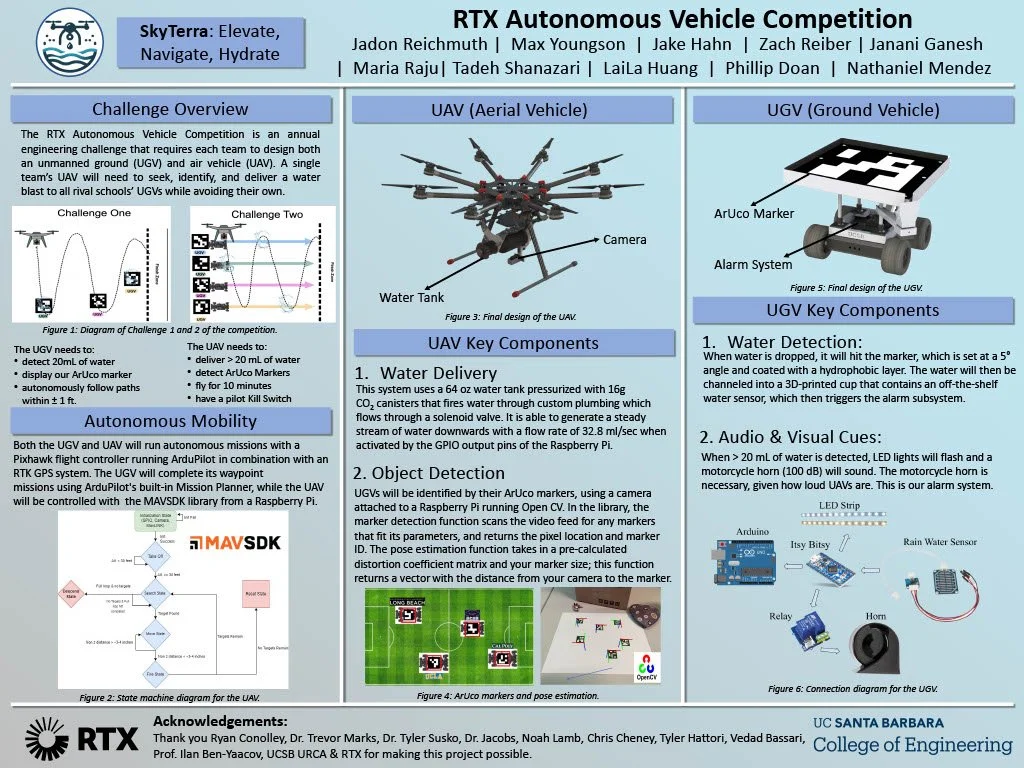
The RTX Raytheon Autonomous Vehicle Competition is a competition between universities sponsored by Raytheon. The premise of the competition is for each team to build both an unmanned aerial vehicle and an unmanned ground vehicle that can complete certain tasks through multiple trials. In all the trials, each university’s UAV goes one at a time to find the other competitors’ UGVs placed randomly on a field and deliver a water payload. The UGV must detect and give both a visual, and audio indication of the water payload if hit. Subsequent trials have the UGV moving in increasingly complicated patterns, such as a straight line, zigzag, and crossing paths with other UGVs. All of this must be done autonomously with no human input other than starting the vehicles.





This project was LaiLa’s Senior Capstone Project and spanned the three quarters of senior year. It was worked on by a 10-person multidisciplinary team of 5 mechanical engineering majors and 5 electrical engineering majors. As one of the mechanical engineering majors, LaiLa worked on the hardware for both the UAV and the UGV.
For the UGV, she was the main person researching possible ground rover kits to be used as the base of the UGV. Once the kit was purchased, she was also the person that set up the rover and do the initial test runs to see how well the rover functioned before handing off the rover to the teammate in charge of the water detection and movement. She also designed and fabricated the ArUco marker mount that went on top of the UGV. ArUco markers were what the UAV used to detect and determine whether a UGV was a team’s own UGV or another team’s.
For the UAV, LaiLa was the main person assembling the drone kit. While she did some initial brainstorming for possible water delivery methods, the final design was not one of hers. LaiLa was also the main person doing repairs and maintenance of the UAV during and after test and practice flights. A lot of this entailed making sure batteries were charged fully and correctly, as well as coming up with quick temporary repairs so that flights could still be done while replacement parts were still being acquired.
On the more administrative side of things, LaiLa was the person who helped everyone on the team sign up for the UCSB URCA grant, which provided significant additional funds. She was also one of the main team members in charge of purchasing materials.
The competition had four divisions in in 2024: East, West, South, and Puerto Rico. UC Santa Barbara was in the West division, competing against CSU Long Beach and CalPoly San Luis Obispo. UCSB won first place, with UCSB’s UAV being the only UAV that could successfully fly and detect ground vehicles.
See more here: UCSB Capstone Projects